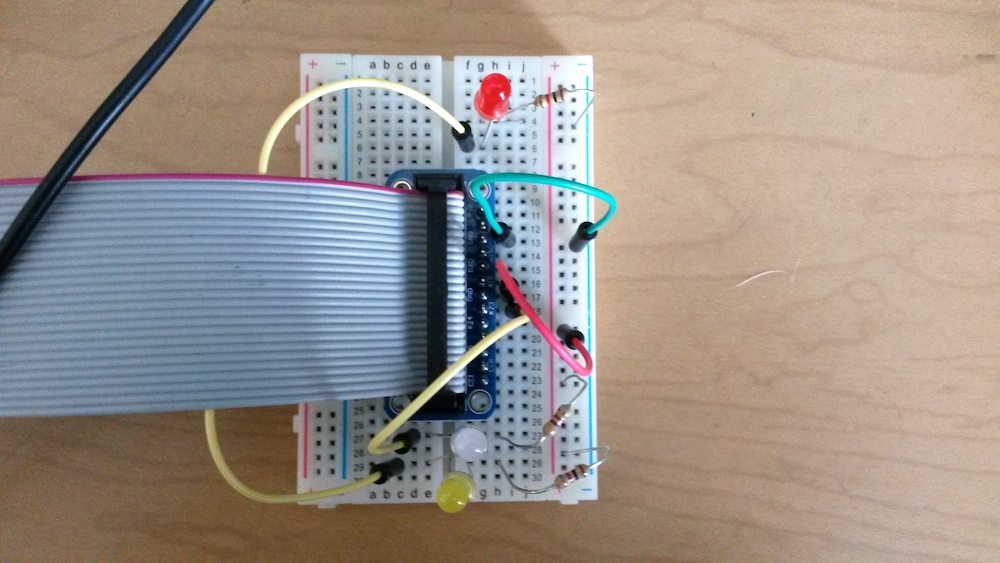
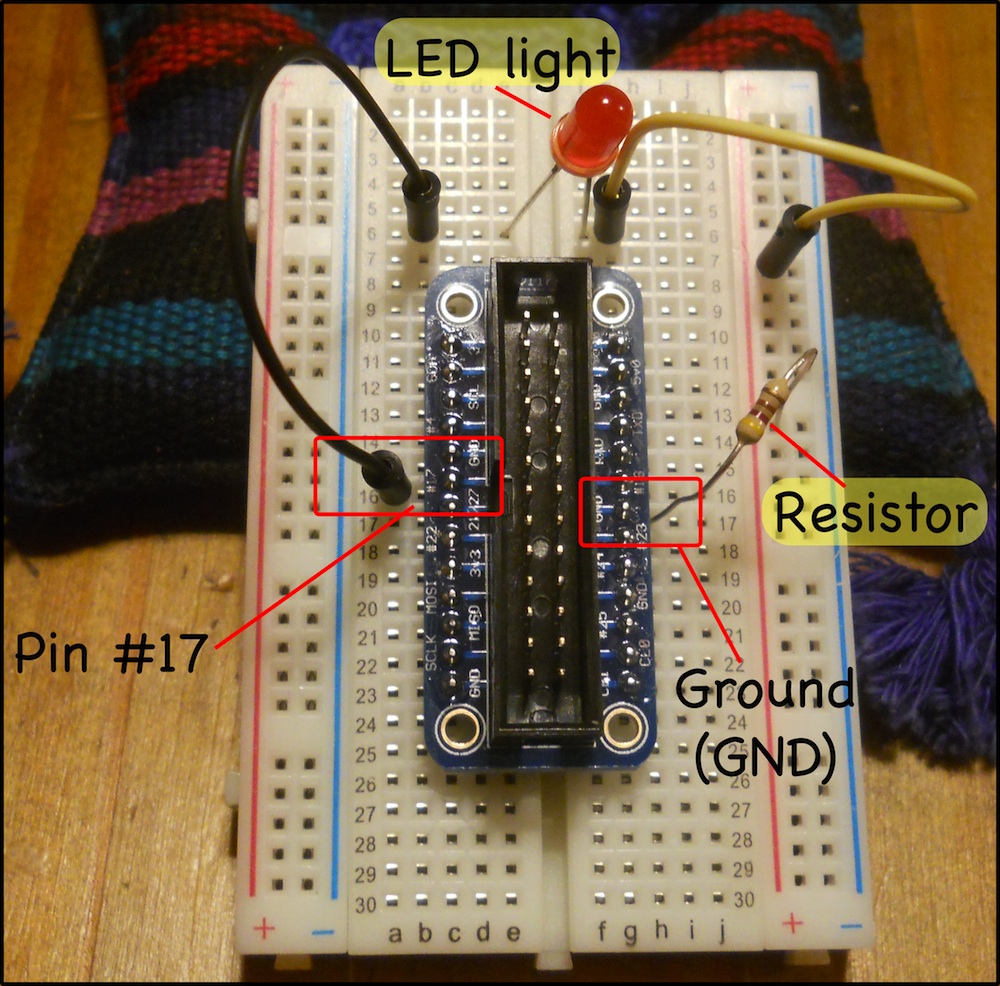
The family of Raspberry Pi’s are just really small computers. You can plug a monitor, keyboard, and mouse into one and it will not look too different from your desktop. They are small and cheap, but what makes them really useful is that they have little slots (called GPIO’s) that you can stick wires into that allow you to build circuits that can get information from sensors and control devices like LED lights or motors.
This is a quick introduction about how to set one up. You’ll find lots of great tutorials on the internet. This one is specific to my needs: it’s an introduction to the Pi’s for students who are new to them; I’m setting it up with a web server so we can control the devices through a webpage; and I’m setting it up so you can control the Pi “headlessly”, which means you don’t need the keyboard, mouse, etc..
Installing the Operating System
Downloading the OS
Download: The operating system files can be downloaded from the Raspberry Pi website. We’re going to use the Raspbian Desktop version with the recommended software.
Your typical computer has a built in hard drive that stores the data you save, the programs/apps you install, and the operating system (OS) that runs it all. When you start the computer the first thing it does is read the files that make up the operating system from the hard drive and set them up in the active, processing memory (RAM). Then when you interact with the computer (type on the keyboard, click the mouse etc.) you’re interacting with the operating system: you tell the operating system what to do, like start up a web browser (Firefox, Chrome, Safari, Explorer, Opera etc.), and it does it. And when your apps want to do something, like save a file, they have to ask the operating system to do it.
On the Raspberry Pi the data for the operating system is not stored on a built in hard drive, but on an SD card (or microSD), which means that you’re going to have to install the operating system yourself to get your Pi running. You can find the operating system at the Raspberry Pi website’s download page.
Installing
As of this writing, I’ve been using balenaEtcher to install the operating system on the SD Card.
balenaEtcher is free and pretty easy to use. Hopefully, your computer has an SD card port, if not you’re going to have to find an adapter. Just plug your SD card into your computer and run Etcher, it will ask you to:
- Select Image: Which is the Raspbian file you downloaded
- Select Drive: Which should default to the SD card you plugged in (check the size of the drive to make sure)
- Flash: Which writes the Operating System files to the SD card, making sure everything is in the right place.
You may see some warnings pop up about Unrecognized Files Systems or similar. You can just close those windows.
When the flashing is done, don’t take the SD card out of your computer (or put it back in if you have) just quite yet. We’re going to set it up so the Pi can automatically connect to the WiFi, which will make it easier to talk to.
Setting Up WiFi
You’re going to have to edit some files on the SD card to give the Pi the information about the WiFi situation so that it can automatically connect. This is most useful if you’re not going to plug in a keyboard and monitor and just want to control the Pi from your computer (more on how to do this later). If you do want to go the keyboard and mouse route, you can just plug the SD card into the Pi, power it up, and set up the WiFi like you would normally do on your laptop.
To edit the files I use Atom on Windows or TextEdit which is built in on Mac. These programs should allow you to easily save files as plain text, without any of the fancy styling that will create errors when the Pi operating system tries to get the information from the files.
WiFi
Create a new file called: “wpa_supplicant.conf” (based on these notes) containing:
ctrl_interface=/var/run/wpa_supplicant GROUP=netdev
update_config=1
network={
ssid="networkID"
psk="password"
}
But you have to change:
- networkID to the name of the WiFi network you’re trying to connect to
- password to the password for the network
If you need to connect to multiple networks (home and school for example) you can add another network command on a new line after the first one:
network={
ssid="otherNetwork"
psk="otherPassword"
}
Save this file to the boot directory of the SD card.
ssh
ssh allows you to remotely connect to your Pi’s operating system. This means that you can use your laptop to control the Pi (however you’ll be using command line commands).
Create an empty file named “ssh” and save it to the boot directory of your SD card.
USB connection
You should be able to find your Pi on the network (I use an app on my phone called Fing) and ssh in. However, to do most of the setup, especially if the Pi has trouble connecting to the WiFi (or you can’t find it on the network), you’ll probably want to set up your pi so you can plug it into your computer’s USB port and control it from the computer. Based on the notes from Adafruit, do this:
Open the file “config.txt” which is in the SD card’s boot directory, and add this as the last line in the file:
dtoverlay=dwc2
Save the file then:
Open the file “cmdline.txt”, find the word “rootwait” and, after it, insert the phrase:
modules-load=dwc2,g_ether
You should end up with something that looks like “…=yes rootwait modules-load=dwc2,g_ether quiet…”:
Connecting to your Pi
To talk to your Pi’s Operating System you should be able to connect your Pi’s USB port to your computer’s or connect over WiFi. Either way you’ll need to use an ‘ssh’ program.
- Windows: I use putty. Install the program and run it. Then you’ll need to enter:
- Host Name: raspberrypi.local
- Password: raspberry
- Mac: I use the built-in Terminal (In your Applications->Utilities folder). Type in the command (don’t type in the “>”):
> ssh raspberrypi.local- Use the password: raspberry
If you go the WiFi route, you’ll need to find your Pi’s IP address and use that as the Host Name.
Update and Upgrade
Once you’re ssh’d in, and are connected the internet, you can update and upgrade the operating system. Type in the commands (without the “>”).
> sudo apt-get update > sudo apt-get upgrade
The “sudo” means you’re giving yourself permission to run commands that could potentially mess up your system. The program you’re running is called “apt-get” which connects to the internet repositories with the latest updates and upgrades to your operating system and programs, and then downloads and installs them. The options “update” and “upgrade” specifically tells the “apt-get” program what you want it to do. Downloading and upgrading may take a while.
Enable Interfaces
You’ll also want to check that the interfaces to the GPIO pins are enabled, so you can build circuits and control them. Notes on this are here.
First check that your tools are installed and updated with the commands:
> sudo pip3 install --upgrade setuptools > sudo apt-get install -y python-smbus > sudo apt-get install -y i2c-tools
Then Activate the Interfaces. You’ll run the command “raspi-config” and then use your keyboard to tab through the windows to activate the I2C and SPI interfaces. These are just two different ways for the Pi to talk to the devices you plug into it.
> sudo raspi-config ---- Interfacing Options -------- I2C ------------ Yes ---- Interfacing Options -------- SPI ------------ Yes
To get this all up an running you need to reboot the Pi:
> sudo reboot now
For the OLED displays
To control the little OLED displays we have, install the adafruit-blinka, and OLED libraries:
> sudo pip3 install adafruit-blinka > sudo pip3 install adafruit-circuitpython-ssd1306
Tornado Server
The tornado server allows us to create webpages on the Pi that we can connect to over WiFi that can be used to control devices connected to the Pi. Install tornado using:
> sudo pip3 install tornado
Now restart everything and we can get to work.
> sudo reboot now