To summarize what we’ve been doing this past quarter in Middle School Science, we’ve compiled this handy little reference table of the equations for motion (mechanics).

Middle and High School … from a Montessori Point of View
To summarize what we’ve been doing this past quarter in Middle School Science, we’ve compiled this handy little reference table of the equations for motion (mechanics).
The Mars Society is sponsoring a Youth Rover Challenge using Lego Robotics kits similar to the ones we’re using for our robotics program. It’s relatively cheap to participate, so it might make for a good initial foray for my students.
↬ Mr. Deitrich.
Today we reconstituted our small groups for science. One student was late getting their name into the bowl so did not get randomly assigned to a group, so I deviated a little from our standard procedure and asked him which group he thought would be the best for him. Not which group he most wanted to be in, but which group he could be most effective — and learn the most — in. But, as a means of following up on all of our discussion at Heifer about what makes a community, before I gave him the chance to answer I asked the entire class to identify what qualities they thought they brought to their groups, and then, separately, I asked them what qualities the would like their teammates to have.
I got a number of interesting answers to the question about what they thought their qualities were. I know how hard it is to self-assess sometimes so I required that they could only put positive qualities, and allowed them to ask their peers for an external perspective.
My favorite response was from one girl who asked her friend sitting next to her what her positive qualities were, and the friend responded, “bossiness”. She thought about that for a second, then nodded and said, “that sounds about right.” When I asked them both why they thought “bossiness” was a positive quality they explained that the one girl was good at taking charge when necessary, and telling everyone what to do. I couldn’t argue with that description, because I’d observed it in their previous group work. The key part though was the “when necessary”, because while she does take charge, she’s very good at managing her group: giving everyone the opportunity for input while still being decisive. Instead of bossiness, I’d probably have used the term “leadership”.
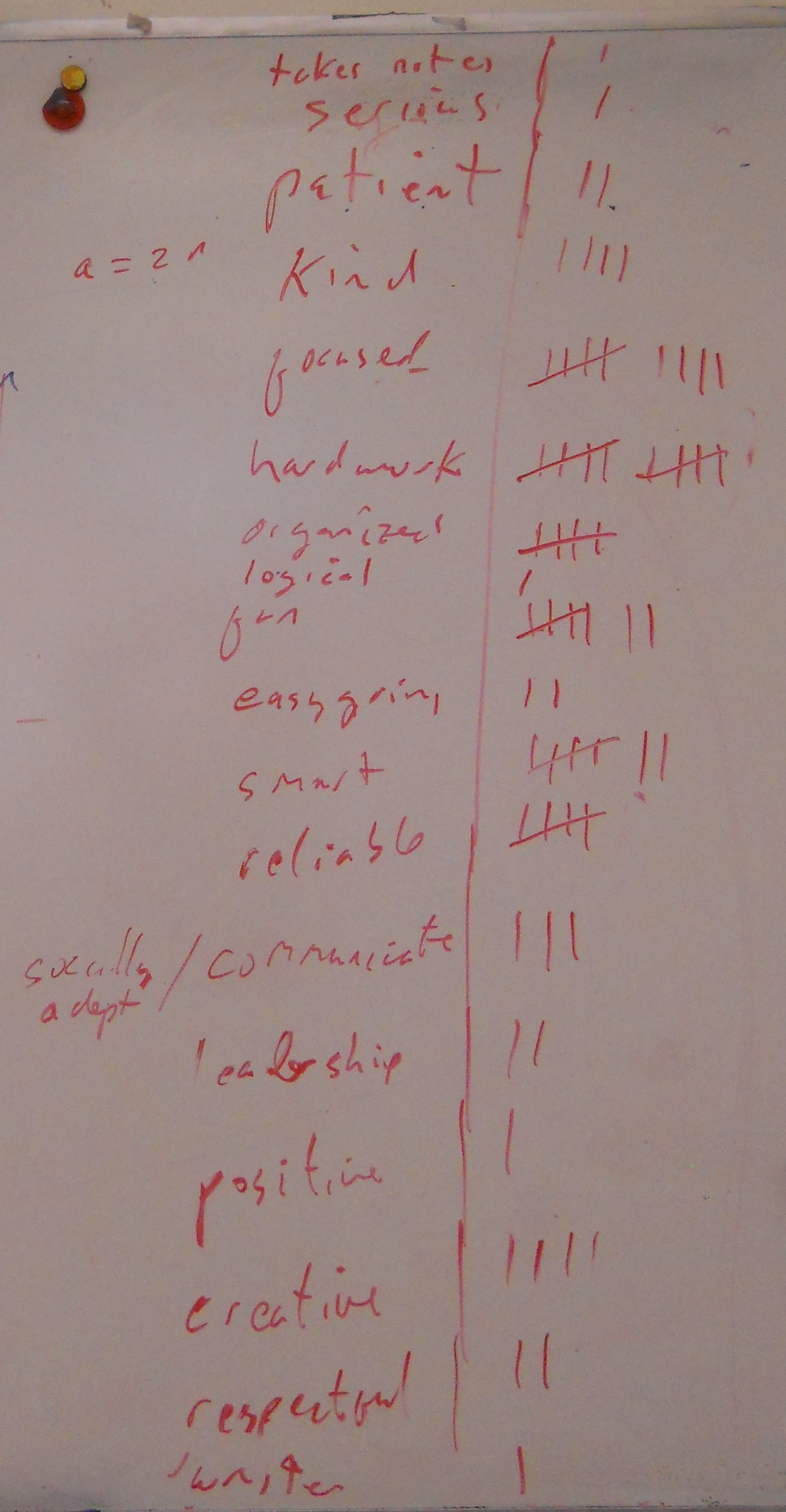
After they had the time to compile their list of qualities they wanted to see in teammates, we compiled a list on the whiteboard (see Figure 1). Perhaps it’s just that they know what I want to hear, but it was quite nice to see that the top two characteristics were:
“Smart” and “fun” were the next most popular on the list, but after some discussion I/we decided to drop the “smart” since their criteria for smart was just having a basic level of intellectual competence, and it was somewhat less important than the other major qualities listed.
Of the remaining three major qualities that they’d like to see in teammates — focused, hardworking, and fun — I asked them each to pick the one they were going to focus on developing over the next month of group work. I asked a couple of the students who chose “fun” to reconsider since it was already one of their current areas of strength.
I then let them pick a second quality to work on from the full list, and had them write their two chosen qualities down somewhere prominent, because we’ll be checking in with them regularly over the course of the next month to see what specific things they’re doing to work on them, and how their efforts are going.
Then I let the student choose his group.
The discussion took the entire class period, and we did not get much “science” done, but if it can get students to be a bit more focused on their work it would be well worth the time.

We have quite a number of box turtles on campus, but this visitor to biology class comes from Ms. M’s garden. You can tell the age by counting the rings on its shell. This guy is about 12 years old.

This year’s trip to the Heifer International Ranch was as excellent as it has been in the past. Students worked in their CSA garden (planting garlic and picking peppers and tomatoes for example), helped with maintenance on the grounds, assisted with taking care of their livestock, and spent a night at their global village. We saw quite the variety of spiders.
Each night, students spent a half-hour doing some reflective writing in their journals, and we had a discussion or lesson that tied into what they’d done or seen during the day.
Students also had a bit of time between lunch and the afternoon activities, which they spent playing games and looking at insects under the microscope.
On the last day, we talked about giving something to the heifer facilitators. One student suggested a coded bead string, but since we did not have any beads, we went with a drawing (see above) that was bordered by a DNA sequence giving the names (and symbols) of all the water-balloon babies the group had on their visit to the global village.

“Stealing is always wrong,” versus, “If I were starving, I’d steal from A. no problem.” That was the gist of our discussion the evening after spending a night in the Heifer’s global village.
The “slum dwellers” had started off with very little in the way of resources, and two of them decided, on their own initiative, to steal some “milk” for their “baby” from the “Guatemalans” who were significantly better off. However, the rest of the slum group found out there was quite a bit of dissension in the ranks.
The thieves also stole most of the rest of the milk while they were at it to trade with the other groups. Their logic — I think — was that since all the groups needed milk, and they would be distributing it, then everyone could ultimately get what they needed, while if they had not stolen the milk then the slums might not have gotten any.
The reverberations throughout the all the houses in the global village were profound, however, lots of distrust and animosity developed that had not been there before. It made it more difficult for the slums to get the other resources that they needed, because the other groups could not trust their motivations.
In fact, the other groups ended up having a harder time trading and communicating with each other because of the breakdown in trust. One other group started to lie about what they had and did not have. At first this was to deter theft, but they quickly realized that they could use this to their advantage.
Interestingly, it all worked out in the end. The slum dwellers felt guilty enough to exhibit real concern when they thought their plan had gone wrong and one of the other groups did not have any milk. The Guatemalans ended up with enough resources of their own to have a decent dinner, and even passed on some of their left-over vegetables to the slums. The slums invited everyone over to the “christening” of their water-balloon baby and everyone came. And we got to have a richer discussion than if everyone had just been nice to everyone else.


I spent another night in the slums. With a different group the dynamics were a bit different. Since I was not to intervene, I spent some of my time taking pictures of the stars.

And pictures with light.



I caught a grasshopper in the bushes this morning. They’re a bit of a pest at Heifer so I didn’t feel too badly about bringing it in to inspect under the microscope.
The students found it to be curious as well. So much so, that one decided — of her own volition — to diagram it as well; including one of the small fecal pellets our grasshopper had graciously deposited into its petri dish.

When we get back, I’ll point out Cmassingale’s nice grasshopper dissection page. It’s a pretty decent reference for gross anatomy.
