3d model of the Hawaiian island chain, rendered in OpenSCAD.
After a lot of hours of experimentation I’ve finally settled on a workable method for generating large-scale 3d terrain.
Data from the NGDC’s Grid Extraction tool. The ETOPO1 (bedrock) option gives topography and bathymetry. You can select a rectangle from a map, but it can’t be too big and, which is quite annoying, you can’t cross the antimeridian.
The ETOPO1 data is downloaded as a GeoTIFF, which can be easily converted to a png (I use ImageMagick convert).
The Hawaiian data with the downloaded grayscale.
Adjusting the color scale. One interesting property of the data is that it uses a grayscale to represent the elevations that tops out at white at sea-level, then switches to black and starts from there for land (see the above image). While this makes it easy to see the land in the image, it needs to be adjusted to get a good heightmap for the 3d model. So I wrote a python script that uses matplotlib to read in the png image as an array and then I modify the values. I use it to output two images: one of the topography and one of just land and water that I’ll use as a mask later on. Hawaiian Islands with adjusted topography and ocean-land.
The images I export using matplotlib as grayscale png’s, which can be opened in OpenSCAD using the surface command, and then saved as an stl file. Bigger image files are take longer. A 1000×1000 image will take a few minutes on my computer to save, however the stl file can be imported into 3d software to do with as you will.
I recently discovered that, although they may look it, Go boards are not necessarily square. They’re slightly longer in one dimension so that the board looks more square to the players on both sides.
A student asked me to make one for him–he’d ordered a set recently and didn’t like the board it came with–so, I wrote a small python program to generate the Go grid, then lasered it onto a nice piece of sanded plywood.
It worked out quite well. Apparently the plywood makes just the right “thunk” sound when you put down the pieces.
Go board in use.
The script to generate the grid. go_board_2.py
from visual import *
from svgInator_3 import *
length = 424.2 #mm
width = 454.5 #mm
nLines = 19
dx = length/(nLines-1)
dy = width/(nLines-1)
print "Lenght = ", length
print "dx = ", dx
f = svgInator("go_board.svg")
lineStyle = {"stroke": "#000", "stroke-width": "2pt",}
#lines
for i in range(nLines):
x = i * dx
y = i * dy
#vertical
f.line(pos=[vector(x,0), vector(x,width)], style=lineStyle)
#horizontal
f.line(pos=[vector(0,y), vector(length,y)], style=lineStyle)
#circles
grid_pos = [(3,3), (3,9), (3,15),
(9,3), (9,9), (9,15),
(15,3), (15,9), (15,15)]
for i in grid_pos:
(x, y) = (i[0]*dx, i[1]*dy)
f.circle(pos=vector(x,y), radius=2.0,
style={"stroke": "#000", "fill":"#000"})
#bounding box
f.rect(dim=vector(length,width), style=lineStyle)
f.close()
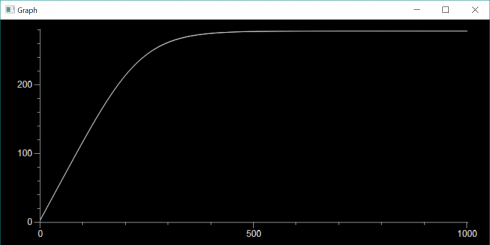
Temperature change over time (in thousands of years). As the Earth warms from 3K to equilibrium.
If the Earth behaved as a perfect black body and absorbed all incoming solar radiation (and radiated with 100% emissivity) the we calculated that the average surface temperature would be about 7 degrees Celsius above freezing (279 K). Keeping with this simplification we can think about how the Earth’s temperature could change with time if it was not at equilibrium.
If the Earth started off at the universe’s background temperature of about 3K, how long would it take to get up to the equilibrium temperature?
Using the same equations for incoming solar radiation (Ein) and energy radiated from the Earth (Eout):
At equilibrium the energy in is equal to the energy out, but if the temperature is 3K instead of 279K the outgoing radiation is going to be a lot less than at equilibrium. This means that there will be more incoming energy than outgoing energy and that energy imbalance will raise the temperature of the Earth. The energy imbalance (ΔE) would be:
All these energies are in Watts, which as we’ll recall are equivalent to Joules/second. In order to change the temperature of the Earth, we’ll need to know the specific heat capacity (cE) of the planet (how much heat is required to raise the temperature by one Kelvin per unit mass) and the mass of the planet. We’ll approximate the entire planet’s heat capacity with that of one of the most common rocks, granite. The mass of the Earth (mE) we can get from NASA:
cE = 800 J/kg/K
mE = 5.9723×1024kg
So looking at the units we can figure out the the change in temperature (ΔT) is:
Where Δt is the time step we’re considering.
Now we can write a little program to model the change in temperature over time:
EnergyBalance.py
from visual import *
from visual.graph import *
I = 1367.
r_E = 6.371E6
c_E = 800.
m_E = 5.9723E24
sigma = 5.67E-8
T = 3 # initial temperature
yr = 60*60*24*365.25
dt = yr * 100
end_time = yr * 1000000
nsteps = int(end_time/dt)
Tgraph = gcurve()
for i in range(nsteps):
t = i*dt
E_in = I * pi * r_E**2
E_out = sigma * (T**4) * 4 * pi * r_E**2
dE = E_in - E_out
dT = dE * dt / (c_E * m_E)
T += dT
Tgraph.plot(pos=(t/yr/1000,T))
if i%10 == 0:
print t/yr, T
rate(60)
The results of this simulation are shown at the top of this post.
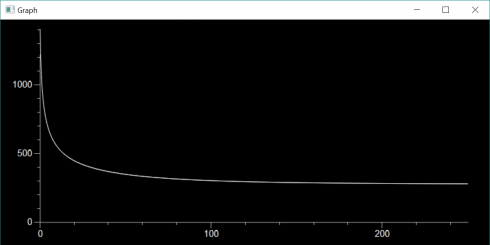
What if we changed the initial temperature from really cold to really hot? When the Earth formed from the accretionary disk of the solar nebula the surface was initially molten. Let’s assume the temperature was that of molten granite (about 1500K).
Cooling if the Earth started off molten (1500K). Note that this simulation only runs for 250,000 years, while the warming simulation (top of page) runs for 1,000,000 years.
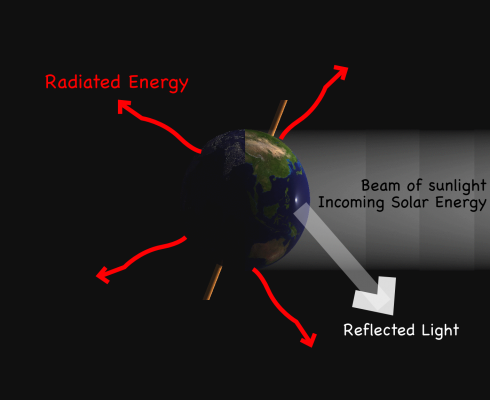
For conservation of energy, the short-wave solar energy absorbed by the Earth equals the long-wave outgoing radiation.
Energy and matter can’t just disappear. Energy can change from one form to another. As a thrown ball moves upwards, its kinetic energy of motion is converted to potential energy due to gravity. So we can better understand systems by studying how energy (and matter) are conserved.
Energy Balance for the Earth
Let’s start by considering the Earth as a simple system, a sphere that takes energy in from the Sun and radiates energy off into space.
Incoming Energy
At the Earth’s distance from the Sun, the incoming radiation, called insolation, is 1367 W/m2. The total energy (wattage) that hits the Earth (Ein) is the insolation (I) times the area the solar radiation hits, which is the area a cross section of the Earth (Acx).
Given the Earth’s radius (rE) and the area of a circle, this becomes:
Outgoing Energy
The energy radiated from the Earth is can be calculated if we assume that the Earth is a perfect black body–a perfect absorber and radiatior of Energy (we’ve already been making this assumption with the incoming energy calculation). In this case the energy radiated from the planet (Eout) is proportional to the fourth power of the temperature (T) and the surface area that is radiated, which in this case is the total surface area of the Earth (Asurface):
The proportionality constant (σ) is: σ = 5.67 x 10-8 W m-2 K-4
Note that since σ has units of Kelvin then your temperature needs to be in Kelvin as well.
Putting in the area of a sphere we get:
Balancing Energy
Now, if the energy in balances with the energy out we are at equilibrium. So we put the equations together:
cancelling terms on both sides of the equation gives:
and solving for the temperature produces:
Plugging in the numbers gives an equilibrium temperature for the Earth as:
T = 278.6 K
Since the freezing point of water is 273K, this temperature is a bit cold (and we haven’t even considered the fact that the Earth reflects about 30% of the incoming solar radiation back into space). But that’s the topic of another post.
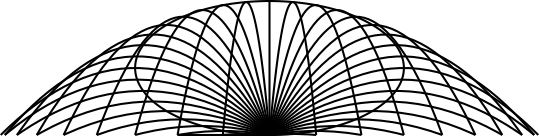
I had my Numerical Methods student calculate the angle that would give a ballistic projectile its maximum range, then I had them write a program that did the the same by just trying a bunch of different angles. The diagram above is what they came up with.
It made an interesting pattern that I converted into a face-plate cover for a light switch that I made using the laser at the TechShop.
This TedEd video explains a few common sorting methods used in computer science. Sorting can be a challenging computational problem because of the enormous number of comparisons between items that can be involved, so computer scientists has spent a lot of time looking into it.
The video below shows the Quick Sort method using Hungarian folk dance.
Previously, I showed how to solve a simple problem of motion at a constant velocity analytically and numerically. Because of the nature of the problem both solutions gave the same result. Now we’ll try a constant acceleration problem which should highlight some of the key differences between the two approaches, particularly the tradeoffs you must make when using numerical approaches.
The Problem
A ball starts at the origin and moves horizontally with an acceleration of 0.2 m/s2. Print out a table of the ball’s position (in x) with time (every second) for the first 20 seconds.
Analytical Solution
We know that acceleration (a) is the change in velocity with time (t):
so if we integrate acceleration we can find the velocity. Then, as we saw before, velocity (v) is the change in position with time:
which can be integrated to find the position (x) as a function of time.
So, to summarize, to find position as a function of time given only an acceleration, we need to integrate twice: first to get velocity then to get x.
For this problem where the acceleration is a constant 0.2 m/s2 we start with acceleration:
which integrates to give the general solution,
To find the constant of integration we refer to the original question which does not say anything about velocity, so we assume that the initial velocity was 0: i.e.:
at t = 0 we have v = 0;
which we can substitute into the velocity equation to find that, for this problem, c is zero:
making the specific velocity equation:
we replace v with dx/dt and integrate:
This constant of integration can be found since we know that the ball starts at the origin so
at t = 0 we have x = 0, so;
Therefore our final equation for x is:
Summarizing the Analytical
To summarize the analytical solution:
These are all a function of time so it might be more proper to write them as:
Velocity and acceleration represent rates of change which so we could also write these equations as:
or we could even write acceleration as the second differential of the position:
or, if we preferred, we could even write it in prime notation for the differentials:
The Numerical Solution
As we saw before we can determine the position of a moving object if we know its old position (xold) and how much that position has changed (dx).
where the change in position is determined from the fact that velocity (v) is the change in position with time (dx/dt):
which rearranges to:
So to find the new position of an object across a timestep we need two equations:
In this problem we don’t yet have the velocity because it changes with time, but we could use the exact same logic to find velocity since acceleration (a) is the change in velocity with time (dv/dt):
which rearranges to:
and knowing the change in velocity (dv) we can find the velocity using:
Therefore, we have four equations to find the position of an accelerating object (note that in the third equation I’ve replaced v with vnew which is calculated in the second equation):
These we can plug into a python program just so:
motion-01-both.py
from visual import *
# Initialize
x = 0.0
v = 0.0
a = 0.2
dt = 1.0
# Time loop
for t in arange(dt, 20+dt, dt):
# Analytical solution
x_a = 0.1 * t**2
# Numerical solution
dv = a * dt
v = v + dv
dx = v * dt
x = x + dx
# Output
print t, x_a, x
Here, unlike the case with constant velocity, the two methods give slightly different results. The analytical solution is the correct one, so we’ll use it for reference. The numerical solution is off because it does not fully account for the continuous nature of the acceleration: we update the velocity ever timestep (every 1 second), so the velocity changes in chunks.
To get a better result we can reduce the timestep. Using dt = 0.1 gives final results of:
which is much closer, but requires a bit more runtime on the computer. And this is the key tradeoff with numerical solutions: greater accuracy requires smaller timesteps which results in longer runtimes on the computer.
Post Script
To generate a graph of the data use the code:
from visual import *
from visual.graph import *
# Initialize
x = 0.0
v = 0.0
a = 0.2
dt = 1.0
analyticCurve = gcurve(color=color.red)
numericCurve = gcurve(color=color.yellow)
# Time loop
for t in arange(dt, 20+dt, dt):
# Analytical solution
x_a = 0.1 * t**2
# Numerical solution
dv = a * dt
v = v + dv
dx = v * dt
x = x + dx
# Output
print t, x_a, x
analyticCurve.plot(pos=(t, x_a))
numericCurve.plot(pos=(t,x))
which gives:
Comparison of numerical and analytical solutions using a timestep (dt) of 1.0 seconds.
We’ve started working on the physics of motion in my programming class, and really it boils down to solving differential equations using numerical methods. Since the class has a calculus co-requisite I thought a good way to approach teaching this would be to first have the solve the basic equations for motion (velocity and acceleration) analytically–using calculus–before we took the numerical approach.
Constant velocity
Question 1. A ball starts at the origin and moves horizontally at a speed of 0.5 m/s. Print out a table of the ball’s position (in x) with time (t) (every second) for the first 20 seconds.
Analytical Solution:
Well, we know that speed is the change in position (in the x direction in this case) with time, so a constant velocity of 0.5 m/s can be written as the differential equation:
To get the ball’s position at a given time we need to integrate this differential equation. It turns out that my calculus students had not gotten to integration yet. So I gave them the 5 minute version, which they were able to pick up pretty quickly since integration’s just the reverse of differentiation, and we were able to move on.
Integrating gives:
which includes a constant of integration (c). This is the general solution to the differential equation. It’s called the general solution because we still can’t use it since we don’t know what c is. We need to find the specific solution for this particular problem.
In order to find c we need to know the actual position of the ball is at one point in time. Fortunately, the problem states that the ball starts at the origin where x=0 so we know that:
at t = 0, x = 0
So we plug these values into the general solution to get:
solving for c gives:
Therefore our specific solution is simply:
And we can write a simple python program to print out the position of the ball every second for 20 seconds:
Numerical Solution:
Finding the numerical solution to the differential equation involves not integrating, which is particularly good if the differential equation can’t be integrated.
We start with the same differential equation for velocity:
but instead of trying to solve it we’ll just approximate a solution by recognizing that we use dx/dy to represent when the change in x and t are really, really small. If we were to assume they weren’t infinitesimally small we would rewrite the equations using deltas instead of d’s:
now we can manipulate this equation using algebra to show that:
so the change in the position at any given moment is just the velocity (0.5 m/s) times the timestep. Therefore, to keep track of the position of the ball we need to just add the change in position to the old position of the ball:
Now we can write a program to calculate the position of the ball using this numerical approximation.
motion-01-numeric.py
from visual import *
# Initialize
x = 0.0
dt = 1.0
# Time loop
for t in arange(dt, 21, dt):
v = 0.5
dx = v * dt
x = x + dx
print t, x
I’m sure you’ve noticed a couple inefficiencies in this program. Primarily, that the velocity v, which is a constant, is set inside the loop, which just means it’s reset to the same value every time the loop loops. However, I’m putting it in there because when we get working on acceleration the velocity will change with time.
I also import the visual library (vpython.org) because it imports the numpy library and we’ll be creating and moving 3d balls in a little bit as well.
Finally, the two statements for calculating dx and x could easily be combined into one. I’m only keeping them separate to be consistent with the math described above.
A Program with both Analytical and Numerical Solutions
For constant velocity problems the numerical approach gives the same results as the analytical solution, but that’s most definitely not going to be the case in the future, so to compare the two results more easily we can combine the two programs into one:
motion-01.py
from visual import *
# Initialize
x = 0.0
dt = 1.0
# Time loop
for t in arange(dt, 21, dt):
v = 0.5
# Analytical solution
x_a = v * t
# Numerical solution
dx = v * dt
x = x + dx
# Output
print t, x_a, x